- 數字報

- 客戶端

- 公眾號

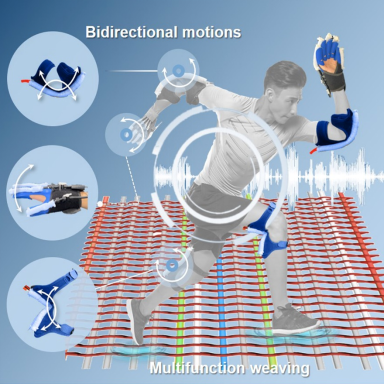
10月17日,記者從江南大學紡織研究所獲悉,該校孫豐鑫副研究員團隊利用工業編織技術靈活定制紗線組合,開發出一種基于織物工程設計的編織氣動軟機器人。相關成果發表在期刊《細胞報告物理科學》上。
如今,可穿戴設備正逐漸進入大眾視野。不過,傳統可穿戴設備大多采用硬質材料,如輔助病人行走的外骨骼機器人等。然而,針對特殊應用場景和需求,如何讓可穿戴設備更加柔和、安全和穿戴舒適,同時具備靈活、精準的變形能力,是近年來柔性傳感技術研究人員正在思考的問題。
在這一背景下,智能軟機器人的概念應運而生。目前,大多數柔性傳感器與驅動器的集成大多依賴鑄造、粘合或化學涂層等方法,這種“附加式”設計容易導致材料間界面應力不兼容,影響機器人的運動性能和穩定性。




團隊負責人孫豐鑫介紹,傳統的軟氣動驅動器通常采用硅膠等彈性材料,充氣時會產生全方位的“氣球式”膨脹,變形操控性較差。而該研究團隊所研制的編織驅動器,是以織物結構和材料組合、運用經緯紗雙系統的機織工藝設計而成,通過定制化設計編織層不同區域的紗線張力形態,有效控制不同區域的彈性差異,從而實現了氣動機器人的“智能”變形。
此外,內置的應變感知紗線是該技術的另一大亮點。研究人員利用創新的織物編程設計方法,使得編織氣動軟機器人具備了自感應和智能反饋的功能,這一功能使得驅動器能夠在復雜、不可見的環境中也能自我調節,可以有效避免傳統“附加式”傳感器帶來的界面應力不兼容問題。
孫豐鑫表示,該軟機器人集成了定向驅動、雙側彎曲及自感知功能,在醫療護理和安全人機交互等領域有著獨特優勢和廣闊前景。

(受訪者供圖)
友情鏈接: 政府 高新園區合作媒體
Copyright 1999-2024 中國高新網chinahightech.comAll Rights Reserved.京ICP備14033264號-5
電信與信息服務業務經營許可證060344號主辦單位:《中國高新技術產業導報》社有限責任公司
